Concurso Robot Reparador
•
1 j'aime•212 vues

En la ciudad de Bogotá hay cerca de 240.000 alcantarillas, sin embargo, al año se pierden más de 8.000, que son hurtadas para reciclar su estructura de hierro. Entre las soluciones que se han propuesto, está la instalación de tapas de alcantarilla de polietileno de alto impacto, lo cual podría tener un alto costo pero disminuiría los continuos robos de tapas metálicas. Tu misión será, construir un robot autónomo, que recorra la ciudad en busca de las alcantarillas destapadas para instalarle las nuevas tapas. ¿Cuántas tapas de alcantarilla lograremos instalar?

Recommandé
Contenu connexe
En vedette
En vedette (10)
Similaire à Concurso Robot Reparador
Similaire à Concurso Robot Reparador (20)
Plus de campus party
Plus de campus party (20)
Dernier
Dernier (10)
Concurso Robot Reparador
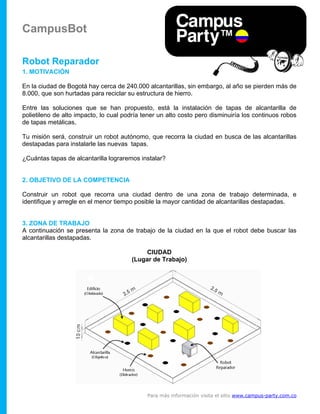
- 1. CampusBot Robot Reparador 1. MOTIVACIÓN En la ciudad de Bogotá hay cerca de 240.000 alcantarillas, sin embargo, al año se pierden más de 8.000, que son hurtadas para reciclar su estructura de hierro. Entre las soluciones que se han propuesto, está la instalación de tapas de alcantarilla de polietileno de alto impacto, lo cual podría tener un alto costo pero disminuiría los continuos robos de tapas metálicas. Tu misión será, construir un robot autónomo, que recorra la ciudad en busca de las alcantarillas destapadas para instalarle las nuevas tapas. ¿Cuántas tapas de alcantarilla lograremos instalar? 2. OBJETIVO DE LA COMPETENCIA Construir un robot que recorra una ciudad dentro de una zona de trabajo determinada, e identifique y arregle en el menor tiempo posible la mayor cantidad de alcantarillas destapadas. 3. ZONA DE TRABAJO A continuación se presenta la zona de trabajo de la ciudad en la que el robot debe buscar las alcantarillas destapadas. CIUDAD (Lugar de Trabajo) Para más información visita el sitio www.campus-party.com.co
- 2. CampusBot 4. DESCRIPCIÓN El lugar de trabajo, estará conformada por una plataforma cuadrada de color blanco, con una dimensión de 2.5 metros por 2.5 metros, que simbolizará una zona de la ciudad. La zona, estará rodeada por muros pintados de color blanco, con una altura de 10 centímetros. Obstáculos Dentro de la zona hay edificios, éstos se conocerán como obstáculos de diferentes tamaños, estarán pintados de color amarillo claro opaco, se ubicarán de forma aleatoria al inicio de la competencia por el jurado, los cuales, deben ser evitados por el robot. Rangos de las dimensiones de los Edificios Ancho: 15 cm – 20 cm Largo: 30 cm – 40 cm Alto: 20 cm – 25 cm Para más información visita el sitio www.campus-party.com.co
- 3. CampusBot Alcantarillas Las alcantarillas destapadas estarán simbolizadas por círculos de color negro con un diámetro de 8 centímetros de longitud. Grietas y huecos En la ciudad también existen grietas y huecos que no deberán ser reparados por el robot, estos elementos son círculos de color café, con diferentes dimensiones, Entre un rango de diámetro entre 4 centímetros y 6 centímetros de longitud. Alcantarillas – Huecos 5. ESPECIFICACIONES DEL ROBOT Autonomía El robot debe ser totalmente autónomo, no son válidos los robots teleoperados a través de cualquier medio de transmisión. Robot Reparador Dimensiones máximas: Ancho: 20 cm Largo: 25 cm Alto: 20 cm Peso: No hay restricción de peso Para más información visita el sitio www.campus-party.com.co
- 4. CampusBot Sensores Para el desarrollo del robot, son válidos dentro de la competencia cualquier sensor óptico (sensores de reflexión de luz), o sensor de toque, comerciales o desarrollados por el equipo no son permitidos los sensores de ultrasonido o los sensores detectores de color. Locomoción No hay restricción respecto a la forma de locomoción del robot, son válidos robots móviles, con ruedas, orugas, o patas. Se pueden emplear cualquier tipo de actuadores comerciales o fabricados por el equipo. Procesador Se permite cualquier procesador o plataforma comercial de desarrollo, desde que ésta se encuentre a bordo del robot. Estructura La estructura deberá ser fabricada por el equipo, con los materiales de su preferencia. Es válido el uso de plataformas tipo LEGO para la construcción del robot. 6. DESARROLLO DE LA COMPETENCIA La plataforma, estará conformada por 8 obstáculos de diferentes tamaños, 8 alcantarillas y ocho huecos o grietas, colocados aleatoriamente, indicadas por el jurado. El robot estará acompañado por un (1) representante, a quien los jurados le entregará ocho (8) plataformas o cortes de color blanco opaco, para que tape las alcantarillas reparadas o ayude al robot en caso de alguna falla. Para más información visita el sitio www.campus-party.com.co
- 5. CampusBot Cada robot iniciará, en un punto aleatorio de la zona de trabajo y debe empezar a buscar las alcantarillas para repararlas. Una vez identifique la alcantarilla, la labor de reparación consiste en detenerse sobre ella durante cinco (5) segundos. Si la verificación del jurado (control de calidad), es correcta, indicará al representante que coloque una tapa blanca, que significa una alcantarilla reparada, por lo que ésta cambia a color blanco para que el robot no la vuelva a identificar. Luego de esto debe continuar la búsqueda. En caso que el robot se encuentre con una grieta o hueco, no deberá hacer reparación sobre este, pues si lo hace se penalizará con puntaje negativo. Para la detección de la grieta o hueco, el robot debe pararse sobre esta, máximo durante un tiempo de dos (2) segundos. Cada robot tiene dos (2) oportunidades o rondas para concursar. Una ronda termina por alguna de las siguientes razones: » Reparación de todas las alcantarillas » Finalización del tiempo máximo para la ronda, establecido en 10 minutos » Superado el límite de dos (2) intervenciones por parte del constructor. El constructor podrá intervenir en caso de bloqueo del robot, o por reparación de algún mecanismo » Superado el límite de un (1) minuto de cada intervención del constructor » Superado el límite de 8 grietas o huecos reparadas como alcantarillas 7. REGLAS ADICIONALES » Los robots, estarán sobre una plataforma, donde el representante los recogerá, o lo guardará durante la competencia » El equipo no deberá realizar ningún tipo de re-programación del robot mientras dure la competencia. Esto para evitar que los concursantes modifiquen el comportamiento de su robot una vez que han podido observar los errores de otros participantes » Una vez finalizado el tiempo de concurso no será válida ninguna acción del robot » Los obstáculos serán ubicados de manera aleatoria al inicio de cada ronda. La posición la definirán los jueces teniendo en cuenta que los obstáculos no deben cubrir alcantarillas ni huecos. Tampoco podrán ubicarse obstáculos a menos de 14 centímetros de una alcantarilla » El robot debe ser una única unidad. No se permiten soluciones basadas en el trabajo de múltiples robots cooperativos. Para más información visita el sitio www.campus-party.com.co
- 6. CampusBot » El robot no debe golpear ni estropear la zona de trabajo. Debe evitar el contacto con las fronteras del escenario y con los obstáculos dispuestos para la ronda » El tiempo transcurrido durante la intervención del constructor, contará dentro del tiempo total de la ronda » Si el robot, requiere una ayuda, este se debe dejar en la posición y en la dirección, donde se encontraba. El tiempo no se detiene 8. GANADOR El ganador será aquel robot que tenga el mayor puntaje al finalizar la competencia, teniendo en cuenta los siguientes criterios: » Tiempo » Cantidad de alcantarillas detectadas » Cantidad de grietas o huecos detectadas como alcantarillas » Intervenciones del constructor » Choque con los obstáculos o los muros Para más información visita el sitio www.campus-party.com.co
- 7. CampusBot 9. PUNTUACIÓN En el desarrollo de la competencia se observarán los siguientes eventos para definir la puntuación: Presentación del robot funcionando + 50 puntos Alcantarilla detectada y reparada + 10 puntos Grieta detectada y no reparada +5 puntos Grieta detectada y reparada -5 puntos Choque del robot con obstáculos o muros -3 puntos Intervención del constructor - 20 puntos Para más información visita el sitio www.campus-party.com.co